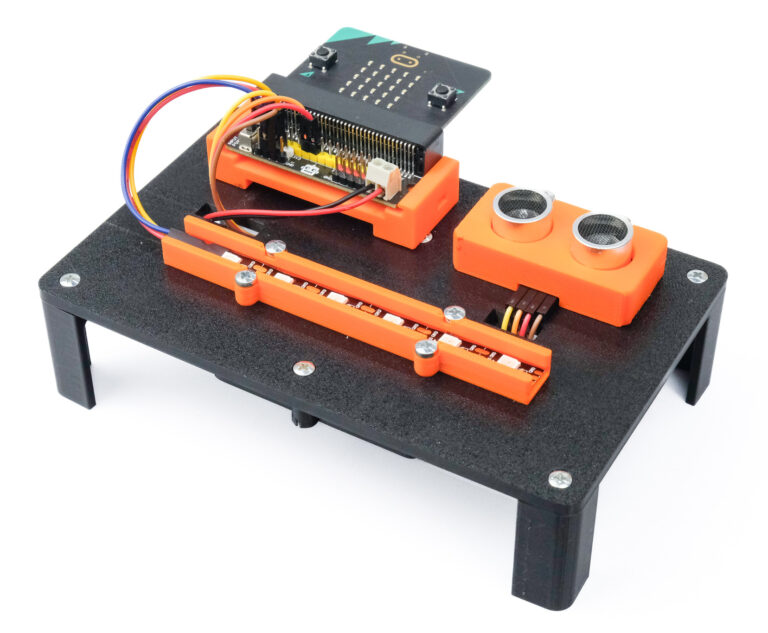



Vytiskněte a poskládejte si přípravek, díky kterému pochopíte, jak funguje ultrazvuk! Zapojte 3D tiskárnu a pusťte se do tisku.
Přípravek Ultrazvuk je vhodný pro všechny věkové kategorie a nevyžaduje žádné speciální dovednosti. Díky jednoduchému ovládání a intuitivním funkcím se stává užitečným nástrojem pro sledování funkčnosti ultrazvuku. ultrazvuk se připojuje k OMG Robotics rozšíření MB1, MB2 i MB3, do kterého jednoduše připojíte micro:bit, jak je vidět na obrázku.
Ultrazvukový senzor využívá ultrazvukový vysílač a přijímač pro měření vzdálenosti od překážky. Senzor vysílá krátký pulz ultrazvukových vln směrem k cíli, a po odrazu od překážky jsou vlny zachyceny přijímačem. Měřením času od vyslání pulzu do jeho návratu senzor vypočítá vzdálenost. Kratší doba pulzu indikuje bližší předmět, zatímco delší doba signalizuje větší vzdálenost. Tímto způsobem ultrazvukový senzor poskytuje rychlé a přesné informace o vzdálenosti od okolních objektů.
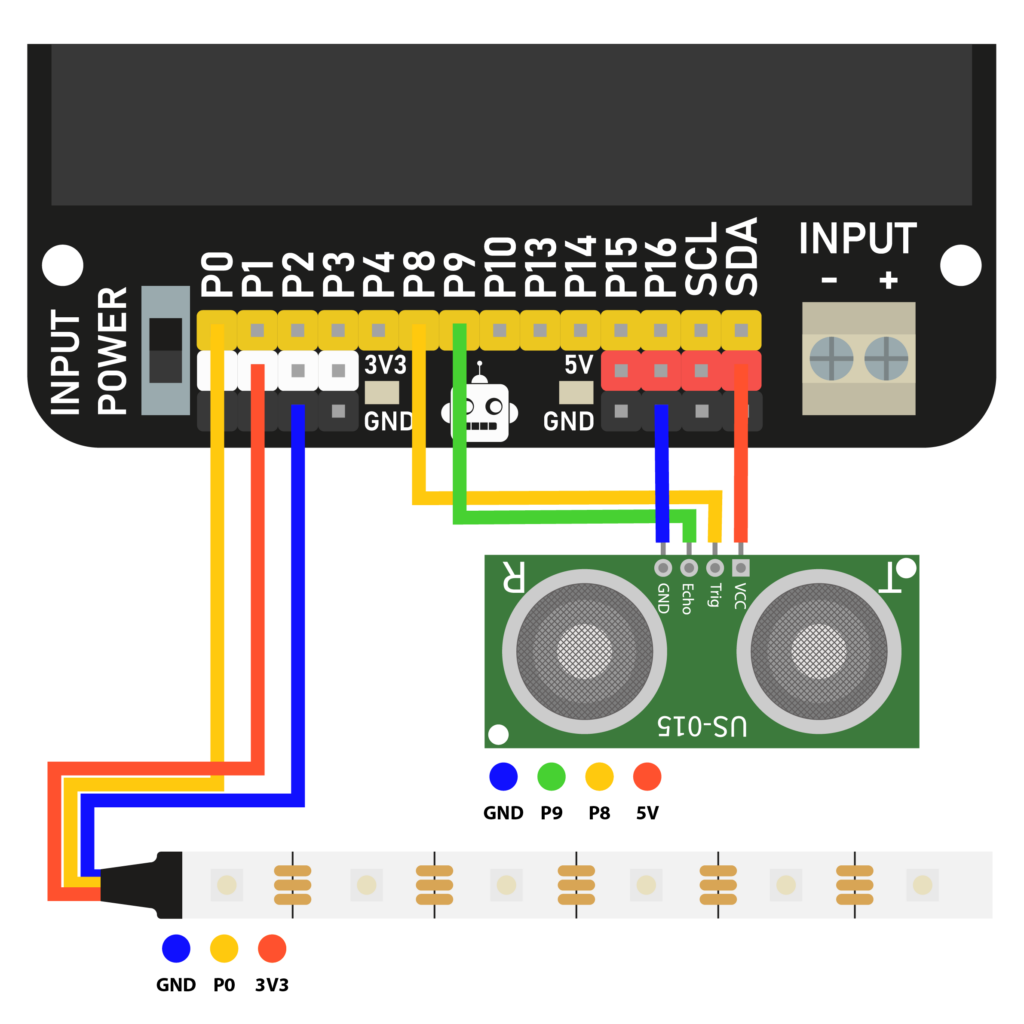
Ultrazvukový senzor se zapojuje pomocí čtyř vodičů. Na senzoru nalezneme kolík VCC (napájení), Trig, Echo, GND (uzemnění). Kolík VCC zapojíme do bílé napájecí lišty na desce, která dodá napětí 3,3V. Kolík Trig zapojíme do pinu 8 (P8), Echo do pinu 9 (P9) a nakonec jej uzemníme tak, že GND zapojíme do černé uzemňovací lišty. Více informací najdete návodu na sestavení.
Při zapojování musí být rozšiřující deska vypnutá a micro:bit odpojený od napájení.
Pro úpravu programu je nutné přejít do programovacího prostředí Make Code. Program funguje tak, že si nejdříve nastaví Led pásek. Následně opakuje část kódu, která neustále porovnává, zda jsme se například s rukou nepřiblížili moc blízko k ultrazvuku. Hranice sepnutí je nastavena na 15 cm. Pokud jsme překročili tuto hranici, kód řekne led pásku, aby se rozsvítil červeně.
Program už je trochu složitější. Na začátku kódu deklarujeme proměnné. Do proměnné distance budeme zapisovat vzdálenost objektu naměřenou ultrazvukovým senzorem. Konstanta NUM_LEDS slouží k uložení hodnoty počtu LED na našem LED pásku. V našem případě jich má pásek 6. Inicializujeme si objekt strip reprezentující náš LED pásek. Nakonec si určíme hranice našeho měření, tzn. minimální a maximální vzdálenost.
První smyčka provádí samotné měření. Bločkem z knihovny Sonar zapíšeme změřenou hodnotu do proměnné distance. Pro převedení naměřené vzdálenosti na počet rozsvícených LED použijeme funkci map z matematické knihovny. V principu tato funkce funguje jako trojčlenka. Výsledný počet však musíme převést na celá čísla pomocí funkce zaokrouhlit dolů (floor). Aby však nabýval počet rozsvícených led se zkracující se vzdáleností měřeného předmětu od senzoru, musíme hodnotu odečítat od maximální možné (počtu LED na pásku).
Ve druhé smyčce rozsvítíme LED pásek. For smyčkou postupně projdeme každou LED. Pokud je pořadí dané LED stejné nebo menší než hodnota leds získaná z první smyčky, přiřadíme LED určitou barvu. Pokud je pořadí vyšší, LED zhasneme (“přiřadíme ji černou barvu”). Nesmíme zapomenout na funkci show, aby se zapsané hodnoty jednotlivých LED projevily. Pro zpomalení změn a zabránění blikání přidáme na konec smyčky pauzu.
Program upravte tak, aby se led pásek postupně zapínal, když se bude měnit vzdálenost od překážky.
Program upravte tak, aby se kromě led pásku zapínal i reproduktor micro:bitu a tím signalizoval, že došlo k doteku.