1.miesto v súťaži ISTROBOT 2017 Bratislava
Robot s064 je už Jakubov 6. návrh line followera v poradí, avšak prvý svojho druhu voči predchodcom. Ako prvý sa totiž stal modulárnym. Myšlienka je jednuchá – ak sa v budúcnosti príde na chybu v niektorej časti tak sa nahradí novšou, nie je tak potrebné meniť celého robota. S predchodcami zdieľal veľa spoločného no svojou modulárnosťou je unikátny.
HW
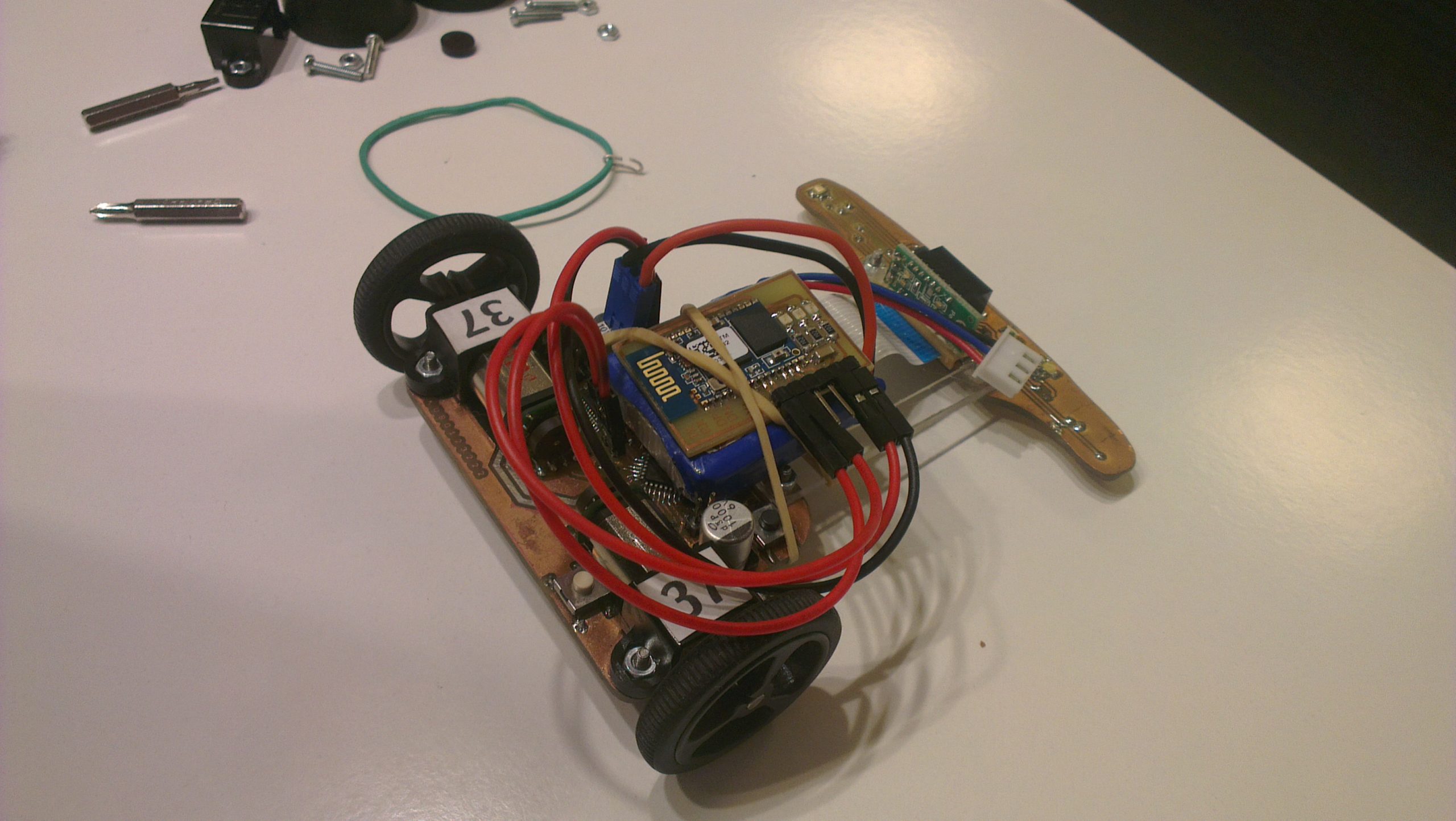
Robot je rozdelený na dve modulárne časti:
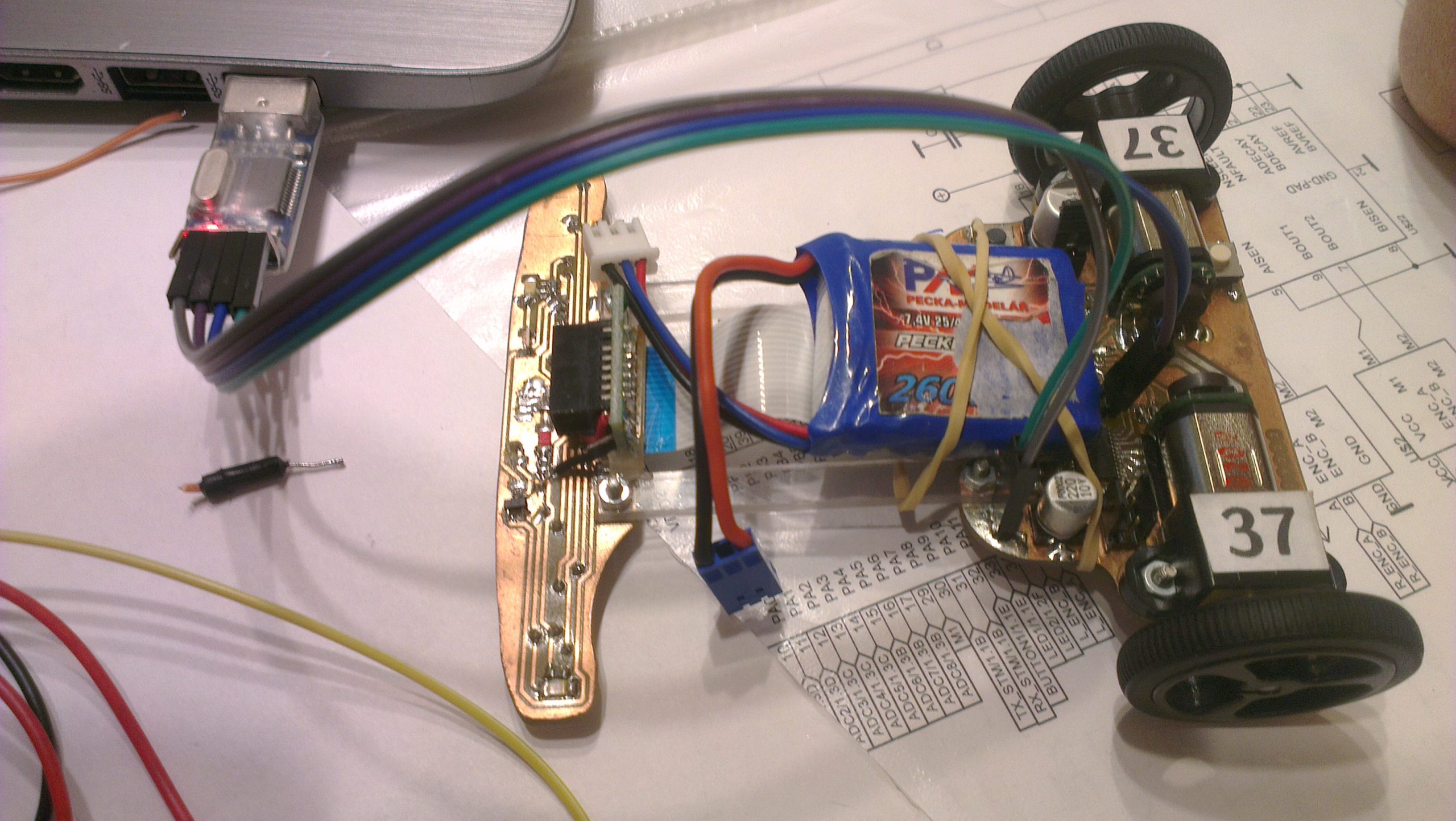
1. podvozok s motormi, procesorom, kde sa pripája aj akumulátor
2. Blok senzorov, ktorý je pripojený flex káblom.
Robot je rovnako ako väčšina predchodcov postavený len na vlastnej nosnej doske plošných spojov, vďaka tomu je ľahký a versatilný. Vďaka rozdeleniu na bloky je možné presne doladiť vzdialenosť, respektíve pomer, rasteru pneumatík s osou senzorov.
SW
Principálna funkčnosť programu: Snímanie hodnôt senzorov -> Vyhodnotenie pozície ->Zadanie rýchlosti každému kolesu
Počas behu programu sa vyhodnocuje spätná väzba – rýchlosť otáčok kolies, to umožňuje robotovi zastavenie kolesa alebo reguláciu rýchlosti na presne požadovanú hodnotu. Pre „udržanie“ robota na čiare bol použitý PD regulátor s nastavenou chybou na stred, princíp – ak sa robot vychíli regulátor sa ho snaží nasmerovať späť. Presné vlastnosti regulátora sme mohli nastavovať externe cez bluetooth z vlastnej mobilnej aplikácie, čo pre nás bolo prínosné hlavne pri testovaní a experimentovaní s robotoch.
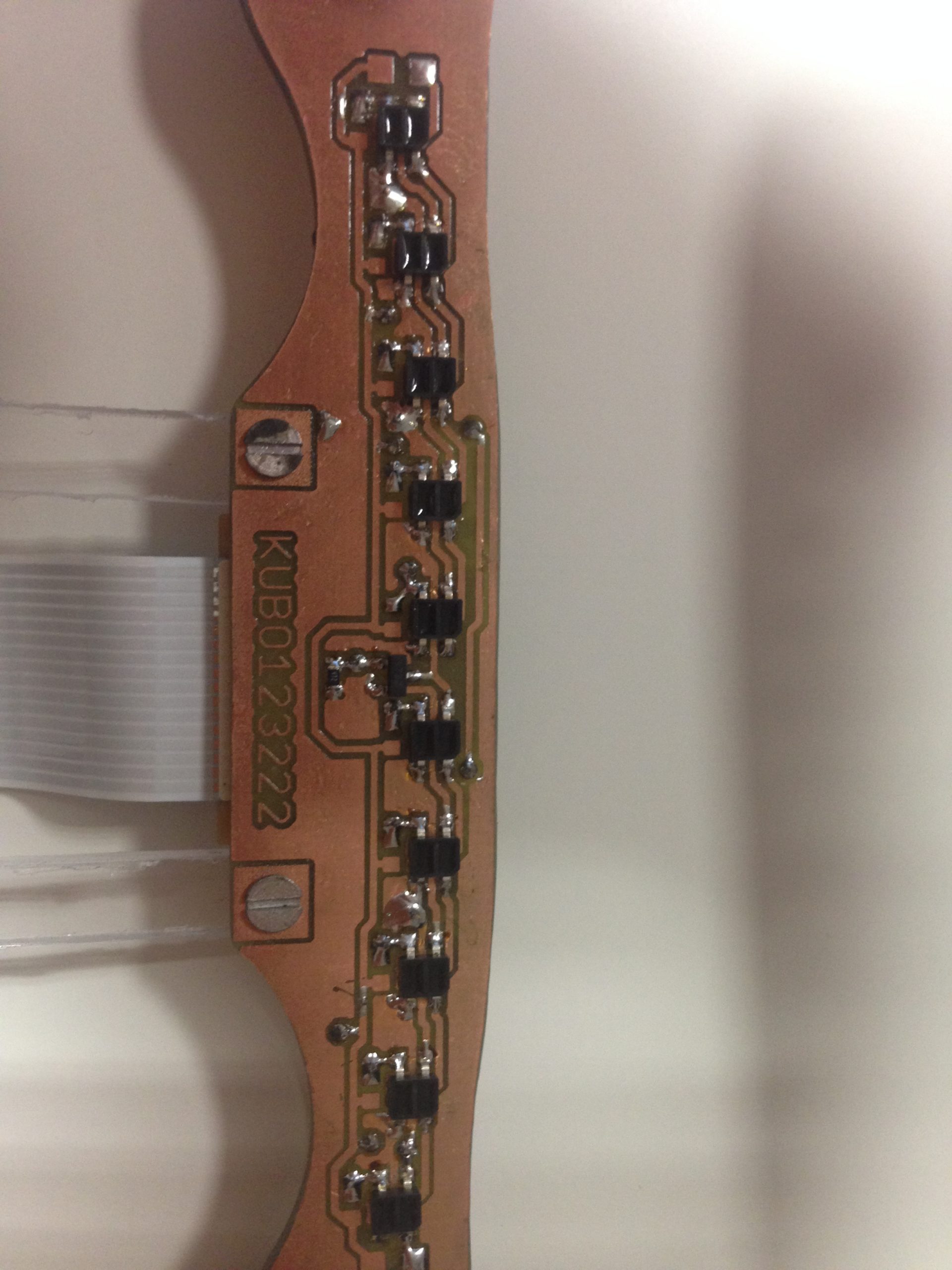
Snímač
Snímač využíva osem modulov s integrovanou kombináciou infra dioda a fototranzistor z desiatich osadený. Blok snímača je vybavený filtrom snímania vlnovej dĺžky v oblasti 930nm, vďaka filtre sa eliminuje množstvo rušenia avšak zostáva rušenia v podobe kamier, slnka, fotoaparátov a pod. s ktorým treba počítať.
Pohon
Dvojica mikromotorov s integrovanou prevodovkou a magnetickým enkóderom. Menovité otáčky: 30000RPMOtáčky po sprevodovaní: 1000RPMNapájane: 6VEnkóder: inkrementálny, 6 pólov
Napájanie
Li-Po akumulátor: 2s
Kapacita 150-250mAh